FA=Factory Automation
2021年9月4日にzoomで開催された「第6回FA設備技術勉強会」で発表した内容を文字起こししたものになります。
空圧機器を使って自動化を実現するための知識です。
発表の動機
転職や個人でのコンサル活動を経て、ある業界では当たり前に使用されている技術が別の業界では全く知られておらず、その技術を使うことで課題を解決した経験から、生産技術系の業界を超えた技術の横展開の機会が必要と思いました。そのため本発表内容はFAの最先端技術を話すものではなく、かなり基礎的なお話し、知っている人からすれば当たり前の話になります。
本題
このページでは電気を使わずに空圧回路で押しボタンを押すとエアシリンダが駆動する。扉が開いていたら駆動しない(インターロックを取る)。おまけとしてシリンダのストローク途中で変速させる空圧回路を解説します。
コンテンツ
1.エアシリンダを動かそう 電気制御
2.エアシリンダを動かそう 空圧回路
3.インターロックをとろう 空圧回路
4.おまけ 変速シリンダ
1.エアシリンダを動かそう(電気制御)
複動式エアシリンダ(以下、シリンダ)を使います。複動式エアシリンダおよびスピコンについてはこちらをご覧ください。
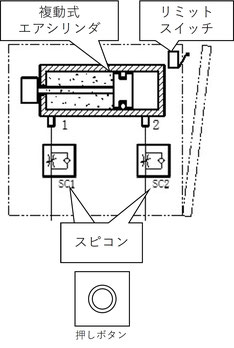
図1.1にあるような構成で、初期状態としてシリンダロッドは引き込まれています。押しボタン(以下PB:Push Button)を押すとロッドが押し出される。単純にこの動作だけをみます。
シリンダは筐体に覆われていて筐体には扉があり、リミットスイッチ(以下LS)で扉の開閉を検知します。開いているときには押しボタンを押してもシリンダが動かないようにします。いわゆるインターロックです。

電気制御で動かすため、図1.2のような構成をとります。
エア供給源(コンプレッサ)から送られてくる圧縮空気が3点セット(*1)を通り電磁弁に供給されます。電磁弁は電気信号を受けて弁体を開閉します。電磁弁への信号は制御機器(PLC)から送られてきます。
PLCではPBおよびLSからの入力信号を受けて内部のラダープログラムに沿って処理を行い、信号を出力します。電磁弁はこの信号を受けて開閉を切り替えます。
(PBとLSの信号をandで出力するようにすればインターロックが取れる。)
これによりシリンダへの圧縮空気の供給/排気が切り替わり、シリンダが駆動します。
(*1)3点セット:フィルター/レギュレータ/ルブリケータのこと。ルブリケータは配管2次側に油を散布するもの。これにより、空圧機器の摺動性を良くする。最近の空圧機器はオイルフリーのものも多く、ルブリケータは使われないケースも多い。

電磁弁は電気の力(電磁力)で弁体を開閉します。電磁弁には図1.3に示すようなパイロット式という、電磁弁とエアオペ弁(圧縮空気を信号として駆動する弁)を組合わせたものがあります。電磁弁を使ってエアオペ弁に送る圧縮空気を制御します。
パイロット式を参考に、電磁弁ではなく機械的に弁体を開閉する弁を使えば電気の力を使わずに流体を制御できます。
2.エアシリンダを動かそう 空圧回路

機械的に弁体を開閉する弁として、具体的には図2.1にあるメカニカルバルブ(以下MV)を使います。(図はSMCさんのHPより引用)セレクタスイッチ(以下SSW)やPB、ローラプランジャやローラレバーのついたリミットスイッチによく似たものもあります。

図2.2に示しているのは先に見た電気制御の回路です。PLCからの出力信号を受けて電磁弁を開閉します。
ここに電磁弁ではなく、圧縮空気を信号として駆動する、エアオペ弁を使います。さらにこのエアオペ弁への(圧縮空気の)入力にMVを使います。
MVを使ってシリンダを駆動させる回路の例を3つ見ていきます。
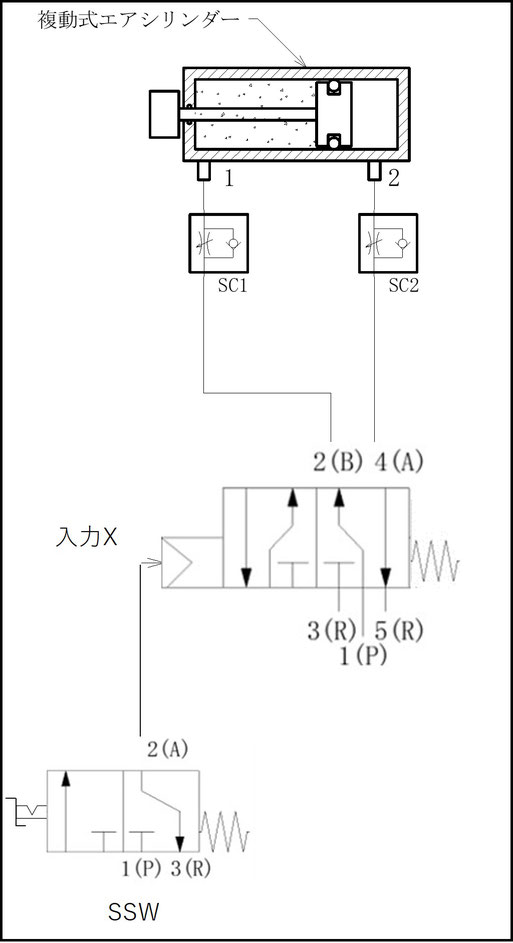
①図2.3に示すような構成です

MVはPBを使います。PBを押していないとき。弁の状態は図の通りです。つまり入力2番ポートは排気3番ポートと繋がっているため、入力Xはオフになっています。このときエアオペ弁は右側の状態となるため、2番に圧縮空気供給、4番は排気になりロッドは引き込まれています。
PBを押すと各弁体が切り替わり、ロッドが押し出されます。この構成の場合はPBを押している間だけロッドが押し出され、PBを離すとロッドは引き込まれます。
②図2.4に示すような構成です。
MVはSSWを使います。SSWの初期状態としては、エアオペ弁への信号はオフでありロッドは引き込まれています。SSWを切り替えると、その状態は保持されるため、ロッドを押し出し続けます。ロッドを引き込むためには再度SSWを切り替えます(元の状態に戻す)。
この構成の場合は押し出し/引き込みの状態を保持します。
③図2.5に示すような構成です。

MVはPBとローラレバーを使います。またエアオペ弁にはダブルタイプを使います。この場合、まずPBを押すとエアオペ弁は左側の状態になりロッドが押し出されます。ダブルタイプのため、PBから手を離してもエアオペ弁の状態は保持されて押し出し続けます。
押し出しのストロークエンドにローラレバータイプのMVを設置し、これがオンになるとエアオペ弁は右側の状態になります。つまりロッドは引き込まれます。
この構成の場合、PBを1回押すとシリンダは1往復動作します。
以上、まずはシリンダを動作させる空圧回路を見ていきました。
3.インターロックをとろう 空圧回路
ここから、インターロックを取る方法を見ていきます。先に見たPBを押している間だけシリンダを押し出す動作で説明します。


図3.1に示すように、扉の開閉検知にMVを使用します。回路は図3.2に示すように構成します。MVはオフ(扉が開)のときエアオペ弁への圧縮空気の供給ポートがMVで排気ポートに繋がっているため、圧縮空気が送られてきません。この状謡ではいくらエアオペ弁を切り替えても動作しません。
MVがオンになって初めて動作するようになります。これがインターロックの取り方です。
この構成ではMVがオフのとき、シリンダは空気が抜けた状態になるため、動作がフリーになります。
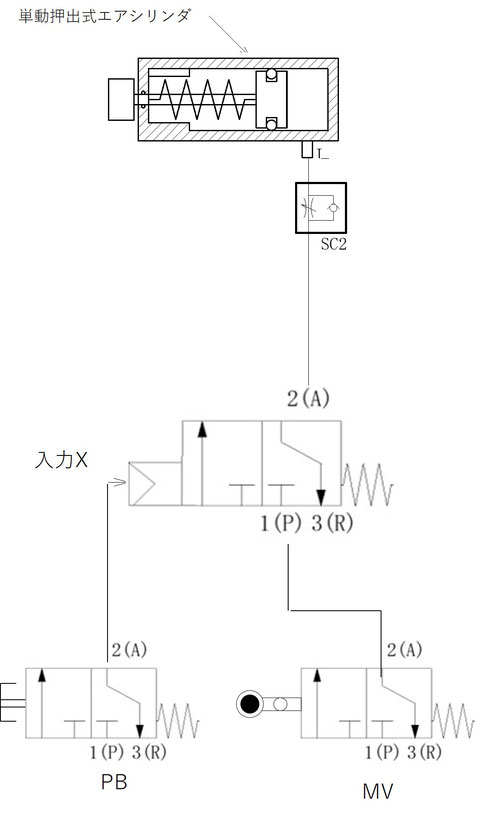
MVオフのとき、しっかりと原点に戻したい場合は例えば図3.3に示すように単動押し出し式のエアシリンダを使います。他には3位置の弁を使う方法もあります。3位置を使うと、扉が開いたときにその場で一時停止させることもできます。
3位置についてはこちらをご覧ください。
4.おまけ 変速シリンダ

複動式エアシリンダには基本的にメータアウトのスピコンを付けて速度を調整します。つまり排気側で速度調整します。
押し出し時の速度を途中で変える回路を見ていきます。
図4.1に示すように、シリンダの1番ポートに繋ぐラインに並列でエアオペ弁を配置します。シリンダ1番ポートからの排気量が最大⑩とし、スピコンで絞ったラインでの流量を①とします。
このとき、並列ラインにはなにも絞りが無いためここに残りの⑨が流れていき、計⑩が流れることになります。
シリンダロッドを変速させたい位置にMVを配置します。このMVによりエアオペ弁を駆動させると⑨流れていたラインが止まります。よって排気量は①しか流れなくなりシリンダロッドの速度を変えることができます。
前のブログは3Dプリンターを使ったものづくりに挑戦!後編です。
次のブログは出版2冊目立ち読みです。
バルブを表す記号が持つ意味の記事をアップしました。0911
コメントをお書きください